4.1.5.4. Reducción de Gauss y Gauss- Jordan
Dos formas especiales de matrices son la escalonada y la escalonada reducida. Una matriz puede tener las siguientes propiedades:
- Todas las filas 1 están en la parte inferior de la matriz.
- El elemento delantero de cada fila diferente de cero, éste es llamado "pivote"; éstos están a la derecha del elemento delantero de la fila anterior (esto supone que todos los elementos debajo de un pivote son cero).
Si una matriz A cumple con esas propiedades, se dice escalonada. Además, cumpliendo estas otras condiciones, decimos que la matriz se encuentra en la forma reducida de renglón escalón o tan solo en forma escalonada reducida.
- Todos los elementos delanteros ("pivotes") son iguales a 1
- Todos los elementos por encima de los pivotes son nulos.
Cuando una matriz representa a un sistema de ecuaciones situaciones como tener una columna de ceros parece imposible ya que correspondería a una variable que nunca habría aparecido. Sin embargo esta situación puede presentarse (imaginemos la ecuación de un plano en el espacio en la que no aparece alguna de las componentes, por ejemplo y+z=0). Así la matriz
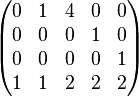
también es una matriz escalonada.
Una vez que la matriz del sistema se ha transformado hasta obtener una matriz escalonada reducida es muy fácil discutirlo (es decir, determinar cuántas soluciones tiene):
- Cuando aparece un pivote en la columna de los términos independientes el sistema es incompatible (no tiene ninguna solución).
- En otro caso el sistema es compatible. Si además el número de pivotes coincide con el número de incógnitas el sistema es compatible determinado (tiene una única solución). Cuando el número de pivotes es menor que el número de incógnitas el sistema es indeterminado (tiene infinitas soluciones que dependen de tantos parámetros como indique la diferencia entre el número de incógnitas y el número de pivotes).
No hay comentarios:
Publicar un comentario